步进电机-相数、拍数和步距角的相关计算
这里梳理步进电机的相关计算问题。
基本概念
本课程中主要强调了的是磁阻式步进电机。磁阻式步进电机的力矩来源于磁路使磁阻最小的能力。下面是一个四相步进电机的图例。
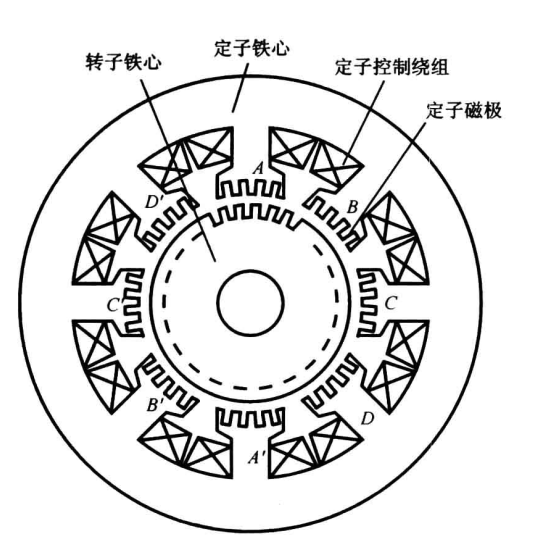
步进电机分为定子和转子两大部分。定子主要需要注意的是磁极。对于$p$相步进电机,通常定子中有$2p$个绕组,也就是$2p$个磁极。也就是说,绕组数等于磁极数。每一相有两个绕组,位于直径的两端。
磁极表面有均匀分布的小齿。转子上也均匀分布着小齿。但是二者数目不是一一对应的。
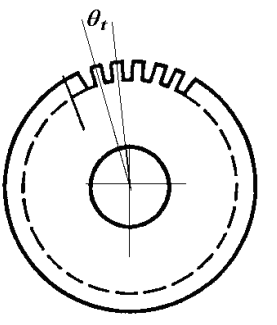
齿距角的定义是相邻两齿中心线的夹角,设$Z_r$位转子齿数,有齿距角$\theta_t$
对于转子齿数的规定是,要求转子转动一半时(即转子从同一相的一个磁极转到了同一相的另一个磁极),定子和转子的齿数相差1。换用课本上的话说,就是
相邻磁极下的定子转子齿之间错开转子齿距角的$\frac{1}{m}$倍。
注意到$m=p$,所以上面两种定义是相同的。写成数学语言便是
因此每一个极距下的转子齿数不是整数。这里正负号通常使转子齿数多一点,即正号。
拍数和步距角
步进电机的控制通常为一个周期$N$个通电状态。在一个周期中,步进电机各绕组的不同通电状态的数量成为拍数。
根据同步电动机的相关知识,每个通电周期之后,步进电机的定子磁场将旋转半周。相应的转子和定子之间的小齿也将在半周内进行同步。因为上面规定了转子和定子齿数的关系,所以每个通电周期转子转过一个齿距角。
步距角的定义是,改变一次通电状态,转过的角度。假设一个通电周期有$N$拍,那么步距角$\theta_b$
常见的通电模式
以四相步进电机为例。常见的通电模式为四相单四拍、四相双四拍、四相八拍。
四相单四拍的通电规律为
四相双四拍的通电规律为
四相八拍的通电规律为
其中有拍数和相数的关系
$k$的值为1时,称其为单拍制,为2时,称其为双拍制。可以看到,四相单四拍和四相双四拍均为单拍制,而四相八拍为双拍制。
单拍制下,步距角为$\displaystyle \frac{1}{m}$的齿距角,双拍制下步距角为$\displaystyle \frac{1}{2m}$的齿距角。
引入电角度
和之前的电机不同,步进电机中电角度等于转子齿数乘以机械角度,即
那么齿距角应该是
步距角自然是
研究力矩
转矩是失调角的周期函数,周期为转子的一个齿距角,即$2\pi$rad电角。
单相通电的时候,静态力矩的基波分量为
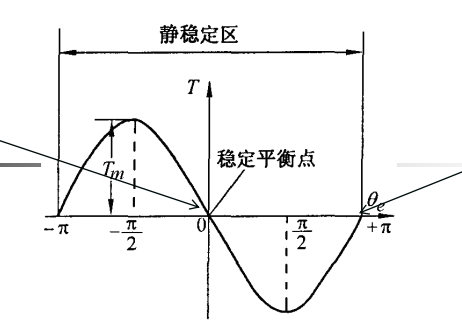
这时的力矩是否为稳定平衡?图中标识了稳定平衡点,这里取了$\theta_{e0}=0$。总之齿正好对齐的时候最稳定。
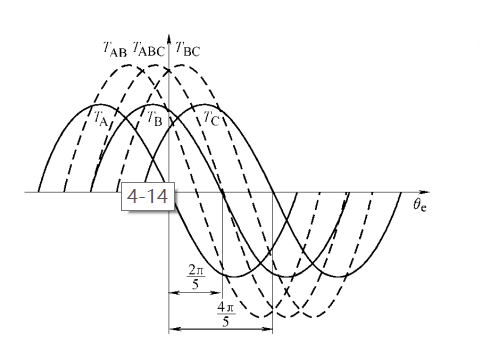
多相通电的时候,就需要考虑不同相之间的电角差距了。
电角的差距应该和步距角相同,那么在$m$相步进电机$n$相同时通电时,静态转矩应该为
单拍制下,步距角有公式
所以最大静转矩为
启动转矩
接下来考虑启动转矩。
正常启动需要让相邻通电状态的合成转矩大于负载转矩。这是因为在正常的通电切换时,不同的通电状态是合成的正弦波,因此力矩最小值通常在切换时取得。
计算启动力矩,需要先得到步距角$\theta_{be}$,因为相邻的磁极的相位差即为步距角。
如果是单相通电,如四相单四拍,那么要考虑的是$\sin(\theta_e)$和$\sin(\theta_e - \theta_{be})$的交点,即
其中$\dfrac{\pi}{2}$是因为取最高点后面的第一个交点,二分之一的步距角是两个三角函数的交点距离最高点的相位差。
如果是双相通电,如四相双四拍,那么就要考虑两项通电时候的合成磁场。
为了取交点,让$T_{AB}=T_{BC}$,得到
通常让$\theta_e$在$[0,\pi]$区间中,得到$\theta_e = \pi$
那么将该数值带进$T_{AB}$得到$T_m$,即为启动转矩。
如果是四相八拍,这时候注意步距角发生了变化,但是计算的步距角依然采取的是单拍的步距角。同样是进行合成
令它们相等得到$\sin(\theta_e - \theta_{be}) = 0$,可以取$\theta_e = \dfrac{\pi}{2}$,得到起动转矩为$T_m$。
这里问题是步距角为什么取的是单拍的步距角?很简单,因为磁极的物理结构要求的偏差为$\dfrac{2\pi}{m}$,正好是单拍的步距角。所以这里的步距角其实是磁极的相位差,数值上等于单拍步距角而已。这个数值的来历是$\dfrac{2\pi}{m} \times m = 2\pi$,即经过$m$个磁极后相角相差$2\pi$,也就是相差一个齿!这正是上文的要求。
对于五相步进电机,上面求得的电角度分别是$0.7\pi$,$0.9\pi$,$0.8\pi$,求得到的转矩分别为$0.81T_m$,$1.30T_m$,$1.54T_m$。
感想
步进电机的原理很简单,但是计算题想要算对算好还是需要扣细节的。
题外话
我写这篇笔记是因为我上课没听,而同时把这些角度全部搞混了,所以写不来作业题。很惭愧,上课摸鱼了造成这个悲剧…
如果以后接着上课摸鱼,恐怕需要摸出来许许多多的课程笔记…
还有其他的知识点我没有写,因为作业里没有。遇到了再整理。
图片来源
本文图片来自《自动控制元件及线路》,系本课程课本。如有侵权我会及时删除。
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!